Grasping with youBot
December 12, 2014
Overview
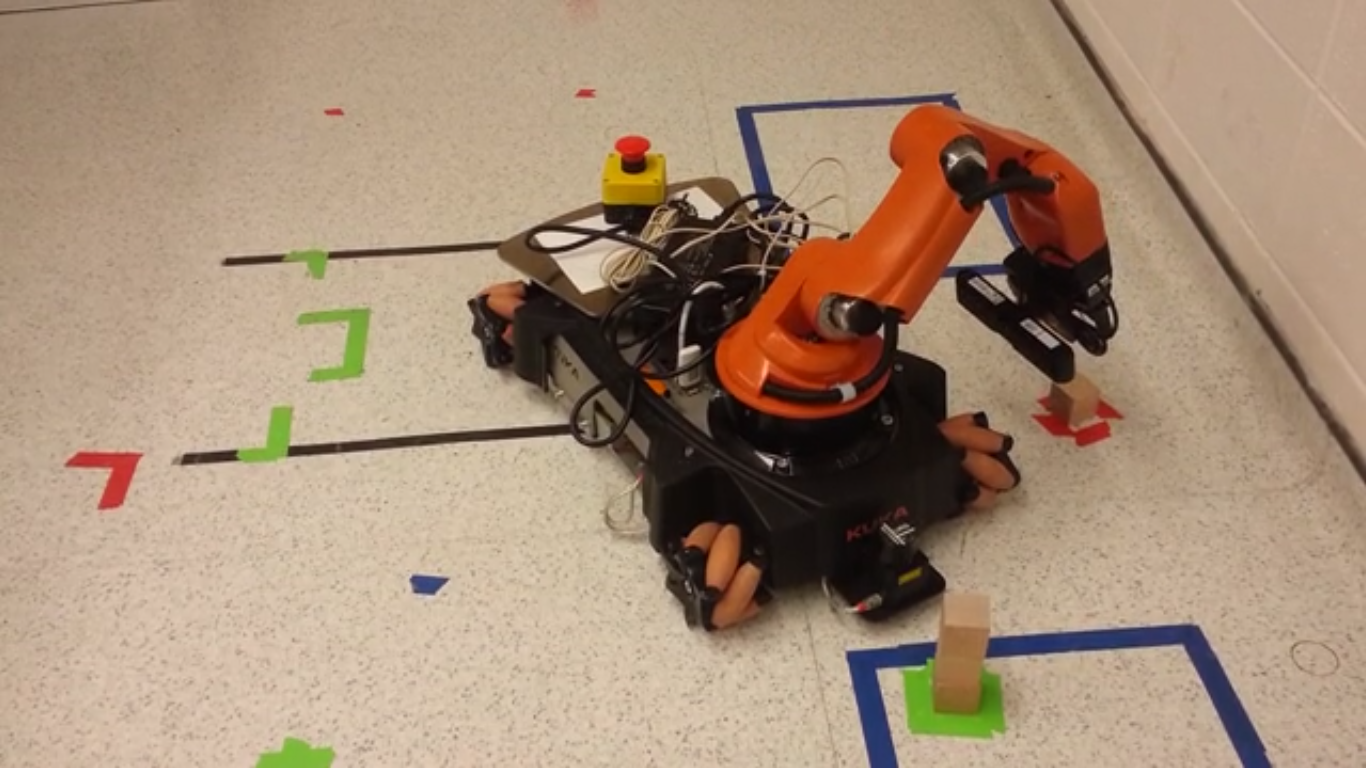
This project is a ROS package called youbot_grasp_msr which controls the arm of the KUKA youBot to grasp an object at various positions around it. Currently it only grasps an object (always a small wooden block during testing) at a specific position near the youBot. The project is on GitHub at this location. See this video to see it in action.